key contributions
Three Core Breakthroughs
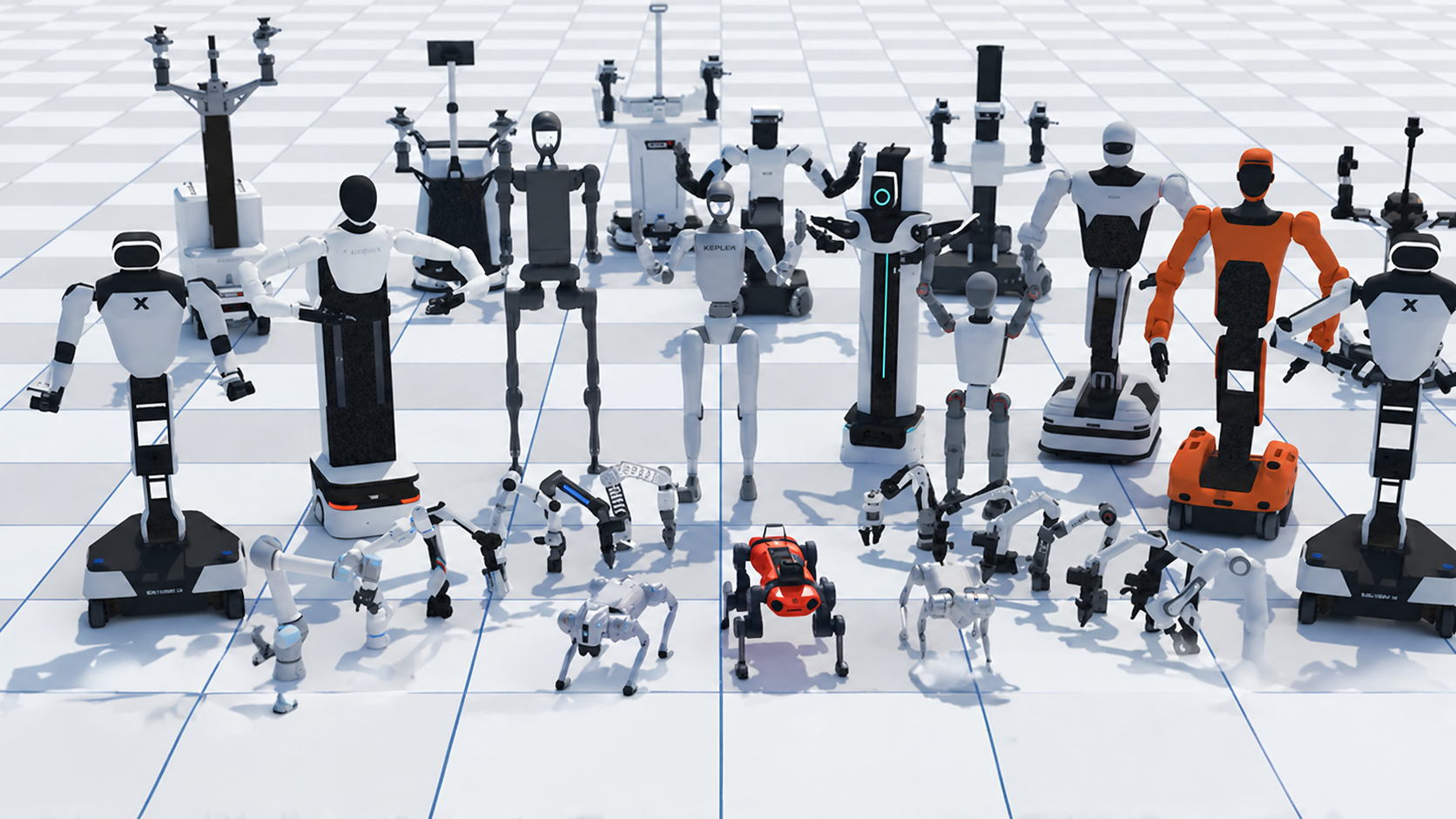
GS-Playground addresses three fundamental bottlenecks that have prevented vision-centric robot learning from scaling.
General-Purpose Embodied Simulation Platform
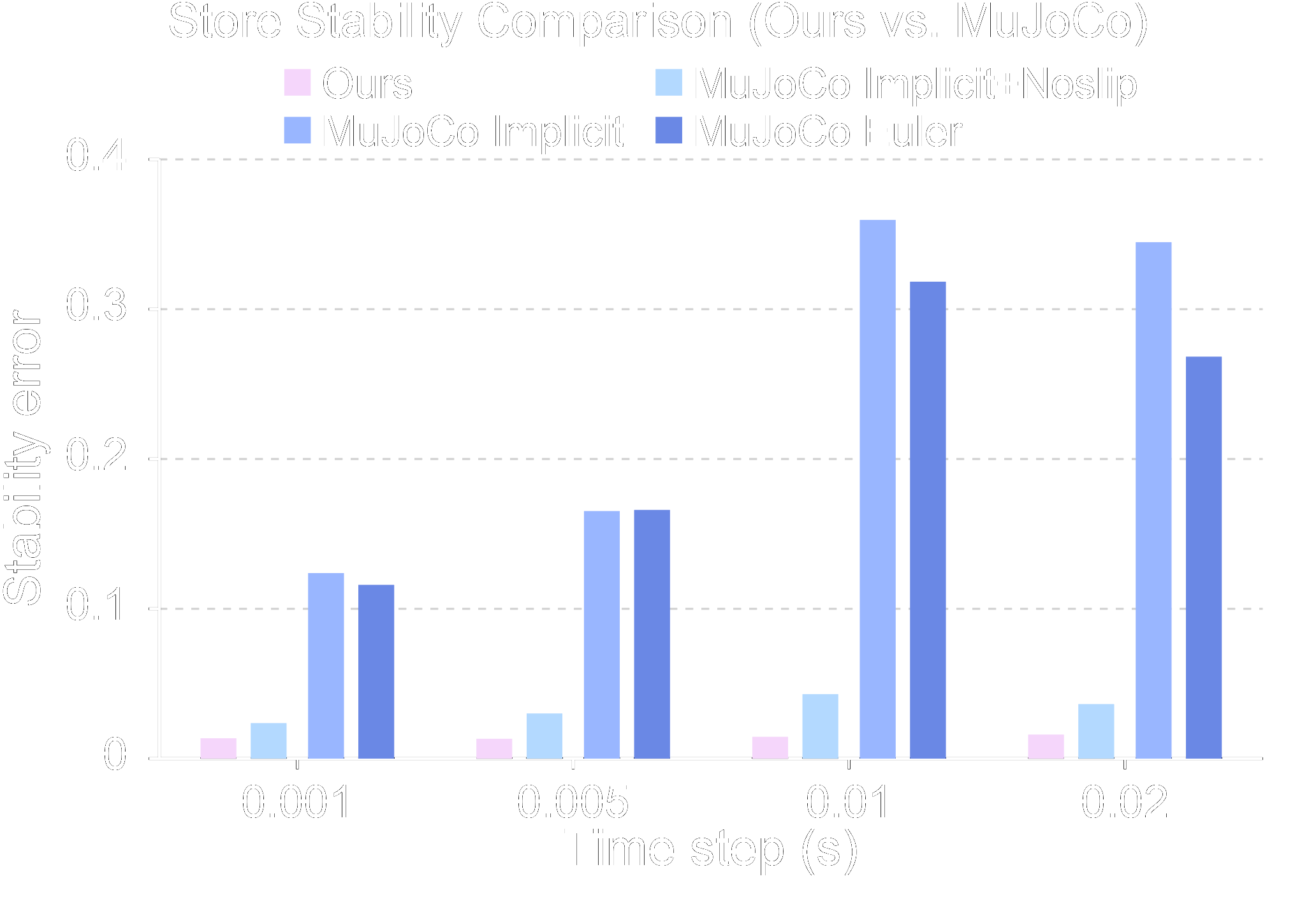
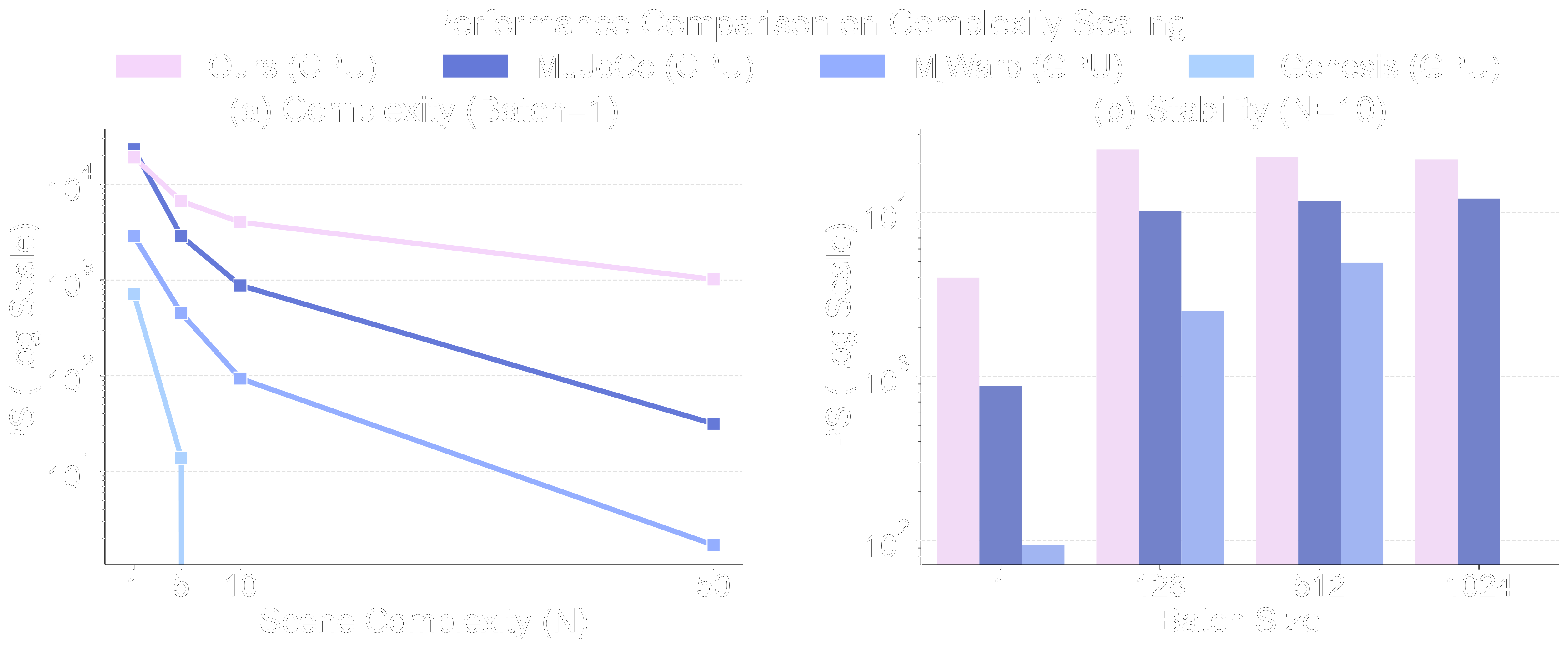
Custom parallel physics engine with full-scene native support for all robot morphologies, cross-platform, superior contact stability.
Memory-Efficient Batch 3DGS Rendering
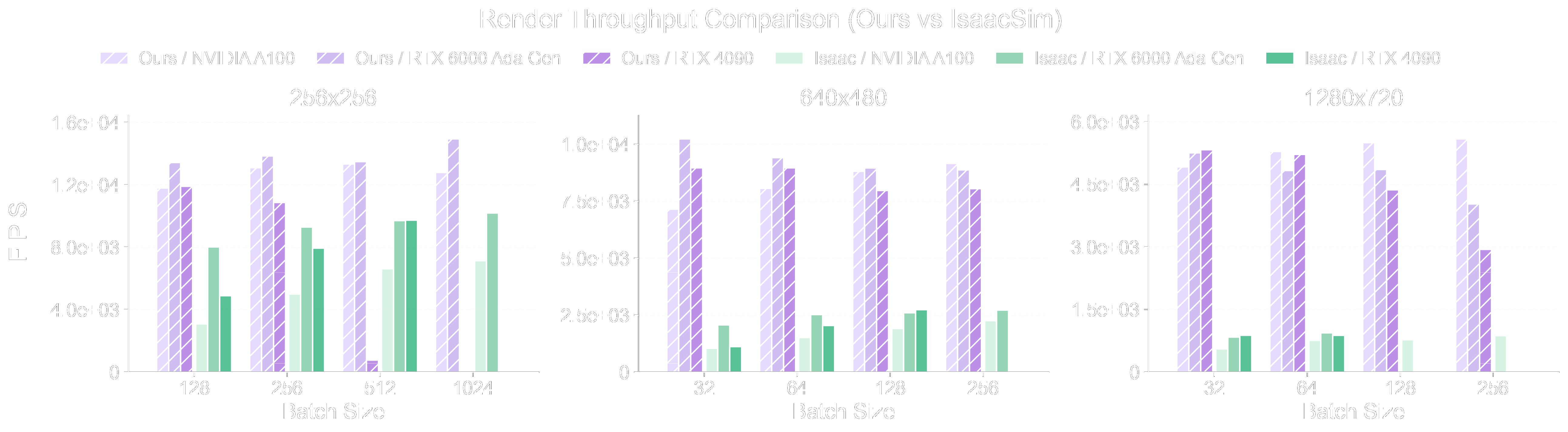
10,000 FPS photorealistic rendering across 2,048 parallel scenes on a single GPU. 90%+ Gaussian compression, PSNR drop <0.05.
Automated "Sim-Ready" Real2Sim Workflow
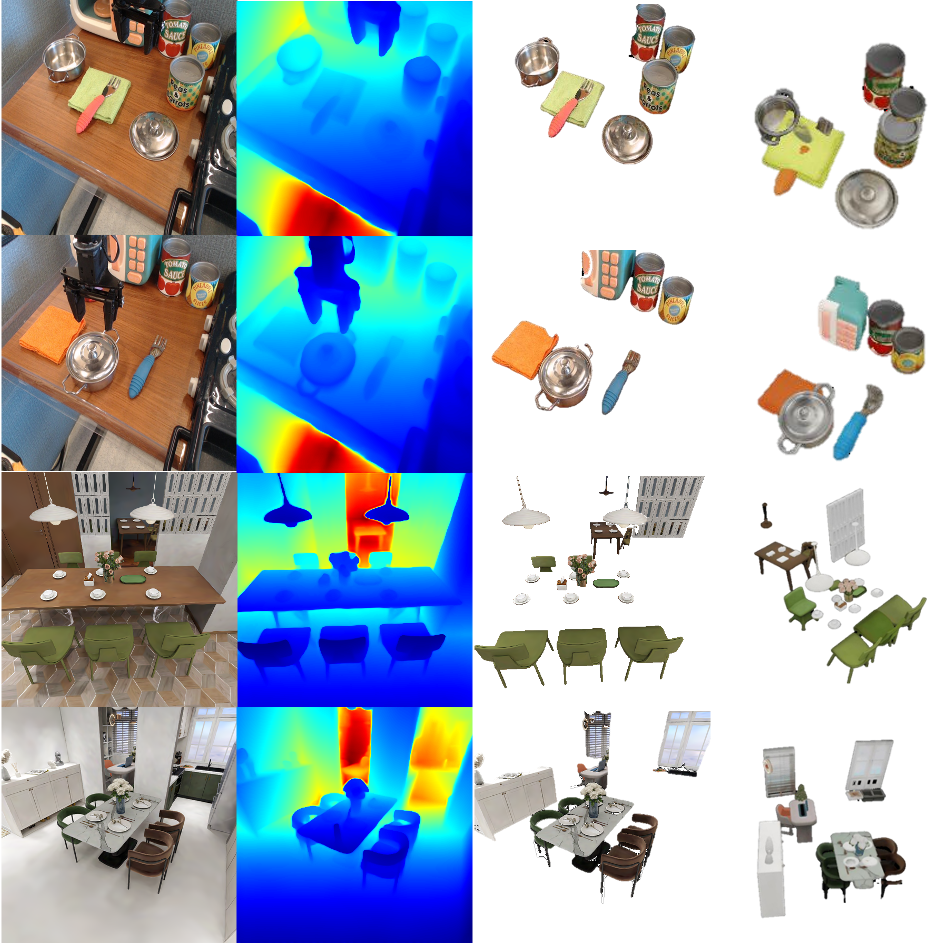
Single RGB image → fully simulation-ready digital twin with 3DGS, mesh, 6D pose, in under 5 minutes. Zero manual modeling.
simulator comparison
| Simulators | Physics Engine | Batch Physics | VRAM Usage | Integrated Batch IK | Batch Renderer | Batch Render Fidelity | 3DGS Env. Num. | Dynamic 3DGS Scene | 3DGS Render FPS | Startup Speed | Physics Cross Platform |
|---|---|---|---|---|---|---|---|---|---|---|---|
| MuJoCo/MJX | Brax/MJX | CPU/GPU | ✕ | Madrona | — | — | — | ||||
| IsaacLab | PhysX5 | GPU | ✓ | omni.RTX | — | — | — | ||||
| ManiSkill | PhysX5 | GPU | ✓ | Vulkan SBR | — | — | — | ||||
| Genesis | Taichi | GPU | ✓ | Madrona | — | — | — | ||||
| DISCOVERSE | MuJoCo | — | — | ✕ | — | 1 ~ 4 | ✓ | ~650 | |||
| GSWorld | PhysX5 | — | — | ✕ | — | 1 | ✓ | — | |||
| GaussGym | PhysX4 | GPU | ✕ | GSplat | Up To 2048 | ✕ | — | ||||
| GS-Playground | Self-Dev. | CPU/GPU | — | ✓ | BatchSplat | Up To 2048 | ✓ | ~10k | |||
// Note: (1) Batch Physics indicates supported hardware. (2) VRAM Usage uses more 💰 for higher VRAM (headless: physics only). (3) Batch Render Fidelity uses more eye icons for higher fidelity. (4) 3DGS Render FPS tested at 640×480 on RTX 4090 + i9-14900K. (5) Startup Speed uses more lightning icons for faster startup. (6) Physics Cross Platform: W/L/M.